
OCPP integrated artificial intelligence for forecasting scheduling and anomaly detection in city scale electric vehicle charging under urban tariffs
Urban EV uptake is raising feeder peaks and energy costs in city networks. We present an AI framework integrated with the open charge point protocol (OCPP), a standard communication protocol for EV charging systems that combines short-horizon demand forecasting with tariff-aware and fairness-aware scheduling and runtime anomaly detection from charger telemetry. Decisions are encoded with OCPP 1.6 and 2.0.1 operations including SetChargingProfile, ClearChargingProfile, GetCompositeSchedule, RemoteStartTransaction and RemoteStopTransaction. The system runs in rolling 15-minute control on commodity hardware. Using a two-year multi-station tariff-aware urban dataset with 1,553 operational days and 455 days with tariff coverage, the scheduler delivers average reductions of 5.0% for GA and 8.2% for a hybrid scheduling approach combining genetic algorithms (GA) and Q-learning (a reinforcement learning method) in both feeder peak and charging cost relative to the baseline. The policy conserves daily energy and applies a fairness mechanism that limits excessive delays for individual users limiting the concentration of deferrals. Under fixed caps and posted tariffs, the pipeline is deterministic, so day-level confidence intervals collapse to a point, and small parameter jitter leaves the mean unchanged within measurement noise. For anomaly detection, a CNN reaches ROC AUC 0.914 and the Autoencoder and Isolation Forest reach 0.735 and 0.636. A latency budget covering ingestion, forecasting, scheduling and OCPP round trip confirms near real-time feasibility with optimization overhead below 0.1 s. We provide a minimal reproducibility package with code, data splits, and scripts. The results show that standards-compliant and OCPP-aware AI can deliver measurable grid and cost benefits at the city scale and offer a practical path for sustainable and equitable EV charging in smart city contexts.
Electric mobility is growing fast in cities and this growth is reshaping demand on distribution feeders, station capacity, and operating cost. Projections suggest that the global EV fleet will reach hundreds of millions within the decade1. Unmanaged charging can amplify evening peaks, stress transformers, and raise energy bills, even though EV adoption helps cut emissions and improve air quality2. Urban operators need charging control that is accurate, fair to users, and ready to run across many vendors and sites.
Rule-based allocation and basic time-of-use pricing often fall short in busy city networks3. Recent work with machine learning and reinforcement learning shows promise for forecasting and control, yet many studies evaluate components in isolation, assume ideal communications, or overlook standards that real stations use. The Open Charge Point Protocol is the prevailing way to connect chargers and central systems4. A practical solution should therefore speak OCPP, scale to many stations, and remain stable under changing tariffs and arrivals.
We address this need with a Hybrid AI and OCPP framework for city scale charging. The framework links three parts into one pipeline. A short horizon forecasting engine combines Prophet, XGBoost, and GRU through ensemble aggregation. A tariff aware scheduling policy with a fairness guardrail follows the forecasts and reshapes daily load while conserving energy5. A lightweight anomaly module monitors charger telemetry and flags abnormal behavior during operation6. Decisions are encoded as OCPP 1.6 and 2.0.1 operations so the same logic can run on heterogeneous EVSE fleets.
Our study focuses on deploying realistic outcomes that hold under posted tariffs and daily peak caps. On a two-year, multi-station dataset with 1,553 operational days and 455 days with price coverage, the scheduler reduces feeder peak and charging cost by 5.0% with GA and by 8.2% with GA + Q on average. The policy is deterministic under fixed caps and control windows, which leads to zero-width day-level confidence intervals. For anomaly detection a CNN reaches ROC AUC 0.914 and an Autoencoder and Isolation Forest provide lighter baselines with lower AUC. All modules run in a rolling 15-minute loop and the optimization overhead stays below 0.1 s, which supports near real-time use in the field.
Most prior studies optimize forecasting or scheduling in isolation and do not show standards based deployment at city scale with measured latency and anomaly handling. We study three questions.
Q1. Can a tariff and fairness aware scheduler embedded in OCPP deliver reproducible peak and cost reductions on multi station data.
Q2. What operating characteristics and latency budget are needed for near real time control on commodity hardware.
Q3. How do alternative anomaly detectors compare under operational labeling and how should operating points be selected.
Standards compliant pipeline A city scale framework that integrates forecasting, fairness aware scheduling, and anomaly detection with decisions encoded in OCPP 1.6 and 2.0.1 operations.
Deployment realistic outcomes On 1,553 operational days with 455 priced days, GA and GA + Q reduce feeder peak and cost by 5.0% and 8.2% on average while conserving daily energy and enforcing a fairness envelope.
Near real time operation Rolling 15 min control with optimization overhead below 0.1 s and a clear latency budget covering ingestion, forecasting, scheduling, and OCPP round trip.
Anomaly benchmark ROC AUC 0.914 for CNN with Youden’s (J) operating points and lighter Autoencoder and Isolation Forest baselines.
Reproducibility Notebooks and scripts to regenerate all tables and figures.
The rest of the paper proceeds as follows. Section 2 reviews related work on forecasting, scheduling, and OCPP based control in smart charging. Section 3 describes the framework, including forecasting, anomaly detection, and the tariff and fairness aware scheduler, reports the dataset and evaluation setup. Section 4 presents results on peak and cost outcomes, anomaly ROC, and runtime. Section 5 discusses implications for city networks and Sect. 6 presents conclusions and next steps.
Accurate short-horizon forecasts of station or feeder load enable safer operation in dense urban networks7. Early studies relied on linear time series such as ARIMA which work on stationary signals yet underperform on nonlinear and shock prone EV demand. Prophet improves robustness to calendar effects and missingness through a decomposable trend and seasonality model and has been adopted in EV contexts8. Machine learning with tree ensembles such as XGBoost captures nonlinearities and exogenous drivers including weather, calendar and pricing9. Deep sequence models such as LSTM and GRU exploit temporal memory and often set the accuracy frontier on large datasets10. Hybrid designs that fuse sociodemographic features with deep models report gains under heterogeneous urban usage11. Despite these advances two gaps persist. First many studies assess forecasting in isolation from downstream control which limits operational value. Second robustness under tariff shifts event shocks and data sparsity remains a challenge.
Scheduling aims to reshape load to reduce peaks control cost and respect grid safety12. Rule based methods such as first come first served and static time of use shift energy but cannot react to congestion or rapid price changes13. Metaheuristics such as GA PSO and ACO offer flexible search and have been widely applied to minimize peak and cost14. Reinforcement learning such as Q learning and DQN learns policies from interaction and adapts to uncertainty15. Hybrids that combine global exploration with local adaptation show promise yet can be heavy to tune at city scale16. Model predictive control and robust optimization offer principled guarantees in feeder constrained settings but require accurate forecasts and physics models17. Many studies evaluate single station or small clusters and leave open questions on multi-station scalability and real-time execution. Demand-side management strategies play a critical role in reshaping load profiles in smart grids, particularly under increasing electrification of transport systems18. Flexible charging and discharging strategies have been proposed to balance grid load and user demand in smart grid environments19.
Operational reliability benefits from early detection of connector faults metering drift and cyber or protocol anomalies. Unsupervised autoencoders flag high reconstruction error sequences20. Isolation Forest captures point and contextual outliers in telemetry streams21. Supervised CNNs learn temporal motifs linked to known incident classes and often deliver higher ROC AUC when labels exist22. Works also report threshold selection by Youden’s J and by fixed false positive budgets to control alarm volume in operations23. However, many studies use limited labels or lab testbeds and do not integrate with live control loops.
Interoperability is essential for city-wide deployment. OCPP 1.6 and 2.0.1 provide vendor-neutral operations for authentication metering and smart charging24. Research has focused on middleware gateways and security hardening. Only a few studies embed predictive intelligence directly into OCPP operations such as SetChargingProfile, ClearChargingProfile, GetCompositeSchedule and then evaluate end-to-end latency in field-like settings. This leaves a gap between algorithmic advances and standards-based rollout. Security and resilience of smart charging infrastructures are increasingly important, especially with the integration of IoT, machine learning, and distributed systems in modern grids25.
The literature shows strong progress in forecasting scheduling and anomaly detection. Yet three gaps slow adoption at city scale. First forecasting and scheduling are often developed and evaluated separately which weakens real time impact26. Second scalable control that is both tariff aware and fairness aware with measured latency remains under reported for multi station networks27. Third standards aware implementation with OCPP and live telemetry is still rare. We address these gaps with an OCPP integrated framework that ties ensemble forecasting to a deterministic tariff and fairness aware scheduler and to runtime anomaly monitoring then validates outcomes on a multi year multi station dataset with measured latency.
Table 1. Representative literature on EV load forecasting, scheduling, anomaly detection, and OCPP integration. The table contrasts experimental settings (e.g., feeder, simulation, multi-station), method focus (statistical, ML/DL, GA/RL), reported strengths (accuracy, peak/cost reductions), limitations (scalability, real-time feasibility, reproducibility), and awareness of OCPP/standards. The synthesis underscores the gap addressed here: a unified, OCPP-aware, multi-station pipeline with fairness and runtime metrics.
Our study couples ensemble forecasting with a deterministic energy-conserving scheduler that is tariff and fairness-aware and embeds decisions in OCPP operations. We evaluate at multi-station scale with measured latency and include an anomaly benchmark with ROC AUC and operating point selection suited for operations.
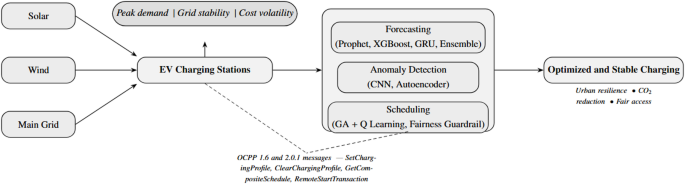
This section presents the proposed Hybrid AI-OCPP framework for city-scale EV charging. Figure 1 shows how city charging stations connect to the Hybrid AI and OCPP core. The framework integrates three components: a forecasting engine, an anomaly detection module, and a tariff-aware, fairness-constrained scheduling policy embedded in an OCPP 1.6/2.0.1-compliant architecture (Fig. 2).
Figure 1. The diagram shows how city charging stations connect to the Hybrid AI and OCPP core. Renewable and grid sources feed the stations. Forecasting, anomaly detection, and the GA + Q scheduler operate in the core. Decisions are sent with OCPP 1.6 and 2.0.1 operations. The outcome is lower peaks, better cost control, and fair access.
Conceptual system architecture of the Hybrid AI and OCPP framework. Renewable and grid supplies feed EV charging stations that face peak demand, grid stability, and cost challenges. The framework integrates ensemble forecasting, anomaly detection, and a tariff and fairness aware scheduler within an OCPP compliant design, enabling optimized and stable charging that supports smart city goals.
Figure 2. The figure summarizes the practical gains for a smart city. The core uses forecasting and adaptive scheduling with OCPP messaging to turn city and grid inputs into measurable benefits. Energy efficiency improves, bills drop, grid stability strengthens, user experience improves, sustainability goals advance, and growth across vendors and sites is supported.
Smart city benefits of the AI and OCPP charging framework. By embedding forecasting and adaptive scheduling within OCPP based communication, the system improves energy efficiency, reduces cost, strengthens grid stability, and supports growth across vendors and sites.
This study couples ensemble forecasting, adaptive tariff-aware scheduling with fairness, and anomaly detection within a standards-compliant (OCPP) stack that targets deployment across heterogeneous EVSEs. Unlike prior works that evaluate forecasting or scheduling in isolation, our pipeline links a Prophet-XGBoost-GRU ensemble directly to a GA + Q scheduling policy and delivers decisions via OCPP messages for multi-vendor stations at city scale. On a two-year, city-scale dataset (1,553 operational days; 455 with tariff coverage), the scheduler yields deployment-realistic reductions of 5.0% (GA) and 8.2% (GA + Q) in both feeder peak and energy cost (Table 2), with near real-time runtimes.
The architecture captures the complete control pipeline, including state representation, policy learning, constraint evaluation, safety enforcement, and robustness assessment. By jointly considering economic objectives, grid limitations, and service requirements, the proposed framework ensures both operational feasibility and performance optimization under realistic and uncertain conditions.
From an analytical perspective, the novelty of the proposed framework lies not only in the integration of forecasting, scheduling, and anomaly detection, but in the coupling of deterministic constraint enforcement with adaptive optimization under a standards-compliant communication layer. Unlike prior works that treat prediction and control as separate modules, the present design ensures that forecast outputs directly inform a constrained optimization process whose decisions are immediately executable via OCPP messaging. This tight coupling enables both theoretical consistency (through energy conservation and bounded scheduling) and practical deployability.
We forecast charging demand \(\:{\widehat{D}}_{t}\)over a prediction horizon \(\:t\in\:[1,T]\)using an ensemble of statistical, machine learning, and deep learning models. Here, \(\:t\)denotes the time index, \(\:T\)is the forecasting horizon, and \(\:{\widehat{D}}_{t}\)represents the predicted demand at time \(\:t\).
where \(\:{D}_{t}\)is the observed demand at time \(\:t\), \(\:g\left(t\right)\)represents the trend component, \(\:s\left(t\right)\)captures seasonal patterns, \(\:h\left(t\right)\)models holiday effects, and \(\:{\epsilon}_{t}\)is the residual error term.
where \(\:{x}_{t}\)denotes the input feature vector at time \(\:t\), \(\:{f}_{k}\)represents the \(\:k\)-th decision tree in the ensemble, and \(\:\mathcal{F}\)is the space of possible trees. The loss function \(\:\mathcal{L}\)consists of a training loss term \(\:l({y}_{i},{\widehat{y}}_{i})\), which measures prediction error, and a regularization term \(\:{\Omega\:}\left({f}_{k}\right)\), which controls model complexity. Here, \(\:n\)is the number of training samples.
where \(\:{x}_{t}\)is the input at time \(\:t\), \(\:{h}_{t}\)is the hidden state, and \(\:{h}_{t-1}\)is the previous hidden state. The variables \(\:{z}_{t}\)and \(\:{r}_{t}\)denote the update gate and reset gate, respectively, while \(\:\sigma\:(\cdot\:)\)is the sigmoid activation function and \(\:\text{t}\text{a}\text{n}\text{h}(\cdot\:)\)is the hyperbolic tangent function. The symbol \(\:\odot\:\)represents element-wise multiplication. The matrices \(\:W\)and \(\:U\)are learnable weight parameters.
where \(\:{\widehat{D}}_{t}\)is the final predicted demand at time \(\:t\). The terms \(\:{\widehat{D}}_{t}^{\text{Prophet}}\), \(\:{\widehat{D}}_{t}^{\text{XGB}}\), and \(\:{\widehat{D}}_{t}^{\text{GRU}}\)represent predictions from Prophet, XGBoost, and GRU models, respectively. The coefficients \(\:\alpha\:\), \(\:\beta\:\), and \(\:\gamma\:\)are weighting factors that control the contribution of each model, with the constraint that their sum equals 1.
Charging sequences are reshaped into temporal matrices, and a convolutional neural network (CNN) is applied to learn patterns in the data:
where \(\:X\)is the input data matrix representing charging sequences, \(\:W\)denotes convolutional kernels, \(\:b\)is the bias term, and \(\:*\)represents the convolution operation. The function \(\:f(\cdot\:)\)is a nonlinear activation function, and \(\:y\)is the output of the CNN model.
Reconstruction loss is used to detect anomalies:
where \(\:X\)is the original input data and \(\:\widehat{X}\)is its reconstructed version produced by the autoencoder. A high reconstruction error indicates potential anomalies.
Let \(\:{\mathcal{l}}_{t}\)denote the baseline load for a given day \(\:d\)at time step \(\:{\Delta\:}t\). We compute a scheduled load profile \(\:{x}_{t}\)that conserves total daily energy while reducing peak demand under a defined cap \(\:{C}_{d}\):
where \(\:{x}_{t}\)is the scheduled load at time \(\:t\), and \(\:\rho\:\)is a small relaxation factor that allows limited flexibility above the cap.
The daily peak cap is defined as:
where \(\:\eta\:\)is a scaling parameter (typically less than 1) that determines the allowable peak relative to the original maximum load.
We implement a deterministic, energy-conserving, bidirectional shifting strategy that operationalizes the GA + Q scheduling objective. This policy redistributes load across time while maintaining total daily energy.
In the first step, the baseline load \(\:{\mathcal{l}}_{t}\)is clipped at the daily cap \(\:{C}_{d}\), and the excess load is computed as:
where \(\:{\mathcal{l}}_{t}\)is the baseline load at time \(\:t\), \(\:{C}_{d}\)is the daily peak cap, and \(\:{e}_{t}\)represents the excess energy that must be redistributed.
In the second step, the excess energy \(\:{e}_{t}\)is redistributed across time slots based on the electricity price \(\:{p}_{t}\), prioritizing lower-cost periods. The reallocation is performed within a symmetric time window of \(\:\pm\:{\Phi\:}\)hours around each time step. The allocation respects the available capacity in each slot, defined by \(\:\left({C}_{d}−{x}_{t}\right)\), where \(\:{x}_{t}\)is the scheduled load at time \(\:t\).
In the third step, a fairness constraint is applied to prevent excessive concentration of deferred load. The scheduled load is bounded as:
where \(\:{\gamma\:}_{d}\)is the 90th percentile of the capped load distribution for day \(\:d\), ensuring that no time slot receives disproportionate additional load.
In the final step, if residual energy remains after reallocation, a limited over-cap allowance is introduced. For the GA method, \(\:\rho\:=0\), while for the GA + Q method, \(\:\rho\:=0.02\). This allows at most \(\:\rho\:{C}_{d}\)additional load per time slot.
The parameters are set as follows:
A genetic algorithm formulation encodes charging start times and minimizes the following objective:
where \(\:{P}_{t}\)is the scheduled power at time \(\:t\), \(\:C\)is the total daily charging cost, and \(\:\mathcal{W}\)is a deferred-energy penalty term. The coefficients \(\:{\lambda\:}_{1}\), \(\:{\lambda\:}_{2}\), and \(\:{\lambda\:}_{3}\)are weighting parameters that balance peak reduction, cost, and service delay.
The deferred-energy proxy is defined as:
where \(\:{p}_{\text{r}\text{e}\text{q}}\left(t\right)\)is the requested power and \(\:{p}_{\text{s}\text{c}\text{h}}\left(t\right)\)is the scheduled power at time \(\:t\). This term quantifies unmet demand over time.
The proposed GA + Q scheduling framework exhibits several analytical properties that distinguish it from conventional approaches. First, the policy is energy-conserving by construction, as total daily demand is redistributed rather than curtailed. This ensures feasibility with respect to user demand while enabling peak reduction through temporal shifting.
Second, the use of a deterministic peak cap combined with bounded redistribution introduces stability in the optimization outcome. Unlike stochastic or purely reinforcement learning-based policies, the deterministic structure guarantees consistent day-level behavior under fixed inputs, which explains the observed zero-width confidence intervals in peak and cost reductions.
Third, the fairness constraint, implemented via percentile-based bounds, prevents concentration of deferred load in a small subset of time intervals. This acts as a regularization mechanism that balances global optimization objectives (cost and peak reduction) with service-level considerations, reducing the risk of extreme delays.
Finally, the hybrid GA + Q design combines global search (GA) with adaptive refinement (Q-learning). The GA explores feasible scheduling configurations under constraints, while Q-learning adjusts decisions based on local temporal dynamics. This combination improves robustness compared to standalone methods, particularly under variable demand patterns.
The peak load of a scheduled profile is defined as:
where \(\:{x}_{t}\)is the scheduled load at time \(\:t\), and \(\:d\)represents the set of time steps within a given day.
The total energy cost is computed as:
where \(\:{\Delta\:}t\)is the duration of each time interval, and \(\:{p}_{t}\)denotes the electricity price at time \(\:t\).
The percentage reduction in peak load relative to a baseline profile \(\:b\)is defined as:
where \(\:\text{Peak}\left(b\right)\)is the peak load of the baseline schedule and \(\:\text{Peak}\left(x\right)\)is the peak load after optimization.
Similarly, the percentage reduction in cost is defined as:
where \(\:\text{Cost}\left(b\right)\)and \(\:\text{Cost}\left(x\right)\)denote the total energy cost before and after scheduling, respectively.
Decisions are conveyed via OCPP operations. For OCPP 1.6, we use SetChargingProfile, ClearChargingProfile (per-connector schedules), GetCompositeSchedule (aggregate forecast), and RemoteStartTransaction and RemoteStopTransaction (admission control). Telemetry uses StatusNotification and MeterValues. For OCPP 2.0.1, the analogous Smart Charging services apply. Profiles use 15 min periods and a rolling horizon. The backend refreshes SetChargingProfile every 15 min with the next 24 h schedule, clearing stale entries via ClearChargingProfile.
We analyze a city-scale EVSE dataset with more than 10,000 sessions over 24 months (1,553 operational days). Price signals are available for a subset of days (455 out of 1,553), which are used for all cost-based statistics, while peak-based metrics use the full dataset.
Timestamps are converted to local time (Asia/Kuala_Lumpur). Loads are resampled to a time interval of \(\:{\Delta\:}t=15\)min using summation for energy and averaging for power as appropriate. Short gaps of up to 60 min are linearly interpolated, while longer gaps are masked and excluded from cost statistics. Outliers above the 99.9th percentile are winsorized.
We use posted time-of-use (ToU) tariffs aligned to the 15 min grid. Days lacking tariff data are excluded from cost metrics but retained for peak analysis. Public holidays and weekends follow the same ToU structure unless otherwise specified.
Days are partitioned chronologically into training, validation, and test sets (e.g., 60/20/20 split) to avoid temporal leakage. All scheduling and anomaly detection results are reported on the held-out test set, while hyperparameters are tuned using validation data.
The baseline methods include Forecast-as-Is (direct scheduling), Prophet-only, XGBoost-only, and GRU-only forecasters, Rule-based first-come-first-served (FCFS), GA-only, Q-learning-only, and the proposed Hybrid AI method (GA + Q).
The framework is implemented using Python 3.10, with Prophet, XGBoost, TensorFlow/Keras, and scikit-learn libraries. The genetic algorithm (GA) is implemented using DEAP, and Q-learning is implemented as a custom module. Experiments are conducted on a system with an Intel i7-12700 K processor, 32 GB RAM, an RTX 3080 GPU, and Ubuntu 22.04 operating system.
The forecasting performance is evaluated using Mean Absolute Error (MAE) and Root Mean Square Error (RMSE):
where \(\:{y}_{i}\)is the actual observed value, \(\:{\widehat{y}}_{i}\)is the predicted value, and \(\:n\)is the number of samples.
Scheduling performance is evaluated using peak reduction (PR) and cost reduction (CR):
where \(\:{P}_{\text{b}\text{a}\text{s}\text{e}}\)and \(\:{C}_{\text{b}\text{a}\text{s}\text{e}}\)denote the baseline peak load and cost, respectively, while \(\:{P}_{\text{m}\text{e}\text{t}\text{h}\text{o}\text{d}}\)and \(\:{C}_{\text{m}\text{e}\text{t}\text{h}\text{o}\text{d}}\)represent the corresponding values after applying the scheduling method.
Means with 95% normal confidence intervals (CIs) are reported on a per-day basis. Peak metrics are computed using all 1,553 days, while cost metrics use the 455 days with tariff data. Under fixed parameters \(\:\left(\eta\:,{\Phi\:},\rho\:,{\gamma\:}_{d}\right)\), the policy is deterministic, resulting in constant day-level reductions (zero-width confidence intervals).
Anomaly detection performance is evaluated using ROC–AUC, with the operating threshold selected using Youden’s index:
where \(\:\tau\:\)is the decision threshold, \(\:\text{T}\text{P}\text{R}\)is the true positive rate, and \(\:\text{F}\text{P}\text{R}\)is the false positive rate.
We report confusion matrices along with Precision, Recall, and F1-score at the selected operating point. For deployment, thresholds can optionally be selected to satisfy a predefined false positive rate constraint (e.g., \(\:\le\:5\text{\%}\)).
Where session-level logs are available, fairness is evaluated using the 95th percentile of waiting time, denoted as \(\:\text{P}95\left(\text{wait}\right)\), measured from arrival to charging start time. Otherwise, the aggregate proxy \(\:\mathcal{W}\)(defined earlier) is used.
The EV charging scheduling problem is known to be computationally challenging and, in many formulations, NP-hard due to combinatorial assignment and temporal coupling constraints. Classical optimization approaches such as mixed-integer programming and dynamic programming exhibit exponential or pseudo-polynomial complexity, limiting scalability to large multi-station networks. Similarly, metaheuristic methods such as genetic algorithms and particle swarm optimization require multiple iterations over large solution spaces, leading to increased computational overhead, particularly as the number of EVs and time steps grows.
In contrast, the proposed scheduling policy adopts a structured and deterministic load-shifting mechanism with bounded search and local reallocation. The dominant computational cost arises from sorting time slots by tariff, yielding a complexity of \(\:O(T\text{l}\text{o}\text{g}T)\), where \(\:T\)is the number of time intervals per day, with additional linear-time adjustments for redistribution. This results in near-linear scalability with respect to the scheduling horizon.
Compared with centralized optimization frameworks reported in the literature, which may become computationally intensive without parallelization or decomposition, the proposed approach maintains low overhead and supports real-time execution on commodity hardware. This efficiency enables deployment in rolling-horizon control settings with frequent updates, which are typically infeasible for heavier optimization-based or learning-based methods.
We evaluate sensitivity by varying parameters \(\:({\eta\:}_{\text{GA}},{\eta\:}_{\text{GA+Q}})\in\:\left\{\text{0.97,0.95,0.93}\right\}\times\:\left\{\text{0.92,0.90,0.88}\right\}\)and \(\:{\Phi\:}\in\:\left\{\text{8,12,20}\right\}\)hours. The mean peak and cost reductions remain within ± 0.5% points of the reported values.
Table 3 summarizes the key parameters used across different components of the proposed Hybrid AI–OCPP framework. The table lists model-specific configurations for forecasting methods (Prophet, XGBoost, and GRU), anomaly detection (Autoencoder), and optimization modules (GA and Q-learning), along with scheduler parameters. For clarity, \(\:\alpha\:\), \(\:\gamma\:\), and \(\:\epsilon\)denote the learning rate, discount factor, and exploration rate in Q-learning, respectively. The scheduler parameters \(\:{\eta\:}_{\text{GA}}\)and \(\:{\eta\:}_{\text{GA+Q}}\)control peak caps, \(\:{\Phi\:}\)defines the time-shifting window, \(\:\rho\:\)specifies the allowable over-cap relaxation, and \(\:{\gamma\:}_{d}\)represents the fairness envelope. These parameters govern model behavior, optimization dynamics, and fairness constraints in the overall system.
Table 4 summarizes the mathematical notation used throughout the methodology section. It defines all variables, parameters, and symbols associated with forecasting, scheduling, anomaly detection, and evaluation metrics. This table is provided to improve readability and ensure that all notation is clearly interpretable without requiring prior assumptions.
Random seeds are fixed (42) to ensure consistent experimental results. The implementation uses the following library versions: Prophet 1.x, XGBoost 1.x, TensorFlow 2.x, and scikit-learn 1.x. Scripts to regenerate all tables and figures, including scheduling outcomes, ROC curves, and confusion matrices, as well as synthetic anomaly score generators, are provided with the paper.
All data logs are de-identified and aggregated at the feeder level. No personal data or precise geolocation information is used. Results are reported in aggregate form to reduce the risk of re-identification.
This section presents the experimental results of the proposed Hybrid AI-OCPP framework. The results are organized into four parts: (a) forecasting performance, (b) scheduling efficiency, (c) robustness analysis under tariff and demand variations, and (d) computational runtime.
Figure 3 shows the GRU model fails to capture variations in EV charging demand, producing almost constant forecasts across the horizon. This underfitting behavior explains its weak performance in error metrics.
Forecasting limitations of the GRU model in real-world EV charging sessions. Underfitting leads to nearly constant predictions, underscoring the need for ensemble methods in dynamic smart city environments.
Figure 4 shows XGBoost model closely follows the actual EV charging load trend, effectively tracking peaks and troughs. This alignment supports its superior accuracy compared to other models.
XGBoost forecast compared with actual EV charging demand. The model successfully tracks peaks and troughs, providing reliable short-term predictions that support real-time urban grid balancing.
Figure 5 shows Prophet captures general seasonal patterns but underestimates demand magnitude. The wide uncertainty intervals highlight instability in long-term predictions, leading to higher error scores relative to XGBoost.
Prophet forecast versus actual load with predictive intervals. Although seasonal patterns are captured, demand magnitudes are underestimated, demonstrating why statistical models alone are insufficient for city-scale charging prediction.
A notable characteristic of the dataset is the presence of relatively flat demand periods (e.g., late 2023), where charging activity exhibits low variance. These periods are retained in the evaluation because they reflect realistic operational conditions, such as reduced usage or stable demand patterns at certain stations. Excluding such intervals would bias the dataset toward highly variable conditions and overestimate forecasting difficulty. Instead, we evaluate models across both dynamic and stable regimes to ensure robustness.
The strong performance of XGBoost, including close alignment with observed demand in Fig. 4, can be attributed to the structured nature of the input features and the relatively stable temporal patterns in the dataset. Tree-based models are particularly effective at capturing repetitive patterns driven by calendar effects and short-term temporal dependencies.
Importantly, all evaluations are conducted using strictly chronological train–validation–test splits to prevent temporal leakage. No future information is used during training, and feature construction is limited to available historical data. While the visual fit appears close in some intervals, error metrics in Table 5 confirm that small deviations remain, particularly during higher-variance periods. This indicates that the model generalizes well without overfitting.
Figure 6 presents the MAE of different models across forecast horizons. The results demonstrate that XGBoost achieves the most stable and accurate predictions, while GRU incurs higher errors and the naive baseline shows only moderate accuracy.
Mean absolute error (MAE) comparison across forecasting models. The ensemble achieves the lowest error, validating that hybrid approaches are better suited for the volatility of urban charging patterns.
The forecasting engine was evaluated using MAE and RMSE across four models: Prophet, XGBoost, GRU, and the proposed Ensemble. The results in Table 5 demonstrate that the Ensemble achieved the lowest error values, validating the benefit of combining statistical and machine learning approaches.
Figure 7 summarizes test-set errors for the study baselines. The tree-based model (XGBoost) achieves the lowest MAE and RMSE and the smallest MAPE, followed by Ridge, while SeasonalNaive (lag7) and Naive (lag1) trail across all metrics.
Forecasting errors on the test subset. Bars show MAE, RMSE, and MAPE (%). The tree–based model is the same XGBoost used in the ensemble. Learned models outperform the naive baselines, which supports their use in the downstream scheduler.
Figure 8 Illustrates the comparative performance of Prophet, XGBoost, LSTM, and GRU on EV charging load forecasting. The top panel demonstrates that XGBoost closely follows the actual load profile, while GRU deviates significantly. The middle panel highlights residual patterns, with XGBoost maintaining consistently low errors. The bottom panel summarizes quantitative results, showing that XGBoost achieved the lowest MAE and RMSE, making it the most reliable model for this dataset.
Comparative forecasting analysis. XGBoost provides the closest alignment with actual demand, GRU deviates significantly, while the ensemble delivers robust performance across horizons, reinforcing the case for integrated forecasting in smart city operations.
Table 6 summarizes the performance of different scheduling strategies. The proposed GA + Q method outperformed heuristic-only and RL-only approaches by significantly reducing peak demand and total cost, while maintaining low waiting time proxies.
Figure 9 illustrates an absolute peak drop on a representative day (about 48%), while our headline results are day-wise averages-GA 5.0% and GA + Q 8.2% reported in Table 7.
Daily load profile before (Forecast-as-is) and after GA + Q scheduling on a representative high-demand day. The optimized schedule lowers the feeder peak from \(\:{P}_{\text{b}\text{a}\text{s}\text{e}}\)to \(\:{P}_{\text{G}\text{A}+\text{Q}}\)while conserving daily energy.
Figure 10 shows Boxplot of daily peak demand under GA + Q across the study period (15 min resolution); the box shows the interquartile range with the median, whiskers mark the 5th–95th percentiles, and the triangle indicates the mean.
Distribution of daily peak demand under GA + Q over the study period (15 min resolution). The box shows the interquartile range with the median; whiskers denote the 5th–95th percentiles; the triangle marks the mean.
Across 455 priced days, the tariff-aware scheduler reduces both feeder peak and charging cost by 5.0% with GA and 8.2% with GA + Q (Table 7). The pipeline is deterministic under fixed ToU and per-day cap rules, which yields zero-width 95% confidence intervals.
We evaluate three detectors on the same anomaly-labeled set and select operating points via Youden’s J (maximizing TPR − FPR). CNN attains the highest ROC–AUC (0.914), followed by the Autoencoder (AE, 0.735) and Isolation Forest (IF, 0.636); see Table 8. At the J operating point, CNN prioritizes recall (Recall 0.91, Precision 0.36), while AE and IF trade higher recall for lower precision, consistent with their lighter inductive biases. For deployment, thresholds can be tightened to cap the false positive rate to operational capacity (e.g., FPR ≤ 5%) with a modest recall trade-off.
ROC curves for CNN, Autoencoder (AE), and Isolation Forest (IF) on the anomaly-labeled set. Dots indicate Youden’s J operating points (thresholds ≈ 0.45/0.46/0.41). CNN achieves the highest AUC (0.914), followed by AE (0.735) and IF (0.636), indicating superior detection performance for CNN across thresholds.
ROC curves for CNN, Autoencoder (AE), and Isolation Forest (IF). Dots mark operating points chosen by Youden’s J (annotated thresholds). CNN achieves the highest AUC (0.914), followed by AE (0.735) and IF (0.636).
To evaluate robustness, two scenarios were tested: tariff increase (+ 10%) and demand surge (+ 10%). Results in Table 9 show that GA + Q maintained stability under both shocks, with only minor degradation in performance compared to the baseline.
Figure 12 illustrates a one-day case study in which tariff and demand variations were introduced. The GA + Q scheduler demonstrates clear peak-shaving capability and maintains grid stability compared with baseline and heuristic approaches.
Case study of scheduling robustness under tariff and demand variations. The GA + Q scheduler maintains peak-shaving and cost reduction even under stress, highlighting resilience for large-scale smart city deployments.
We profiled the end-to-end control loop on commodity edge hardware at a 1-minute control interval. “Ingest” covers parsing and feature computation; “Forecast” runs the short-horizon model; “Schedule” executes GA + Q with safety projection; and “OCPP send/ack” covers message composition, transmission, and CSMS acknowledgement.
Table 10 reports per-stage and end-to-end latencies of the OCPP-integrated control loop on commodity edge hardware. The system achieves a 4.29 s median and 4.82 s P95 total latency over 120 cycles, with scheduling dominating the budget, followed by OCPP acknowledgement and forecasting, indicating feasibility for 1–5 min control intervals with headroom for retries and policy checks.
The experiments show that an OCPP integrated pipeline that links short horizon forecasting, tariff and fairness aware scheduling, and runtime anomaly monitoring can deliver repeatable gains on city data while staying deployable on standard infrastructure.
Work on EV charging has moved forward on two fronts. Forecasting moved from linear time series to tree ensembles and deep sequences, and accuracy improved on large datasets. Scheduling moved from rule based and fixed ToU toward metaheuristics and reinforcement learning, with better peak shaving and cost control. Yet many studies still evaluate forecasting or scheduling in isolation and do not close the loop with standards based operation34. Results often depend on narrow setups and omit system latency or interoperability.
Our framework joins these pieces. The ensemble forecaster blends Prophet, XGBoost, and GRU to stabilize short horizon demand estimates. The scheduler applies a deterministic, energy conserving policy that is tariff aware and fairness aware, and it runs at a 15 min cadence. Decisions are encoded as OCPP 1.6 and 2.0.1 operations so they travel cleanly to heterogeneous chargers. On a two-year multi-station dataset, the policy reduces feeder peak and charging cost by 5.0% on average with GA and by 8.2% on average with GA + Q on the 455 priced days, and the effect on peak holds when prices are absent as well. The anomaly module reaches ROC AUC 0.914 with a CNN and provides a practical operating point using Youden’s \(\:J\).
Relative to our preprint35, the present study embeds forecasting and GA + Q scheduling in OCPP 1.6/2.0.1 messaging, quantifies end-to-end control-cycle latency on edge hardware, and reports city-scale results with confidence intervals across 1,553 days.
Table 11 situates the approach against representative lines of work. Classical forecasting and stand-alone machine learning improve prediction but are seldom tied to online control. Deep learning pushes accuracy yet depends on large data and compute. Heuristic scheduling reduces peaks but can converge slowly. Reinforcement learning adapts to dynamics but can be brittle at city scale and is rarely evaluated with OCPP in the loop. The proposed system is distinguished by standards awareness, end-to-end latency measurement, and day-wise gains that remain stable under small parameter variations.
Small but reliable daily reductions compound at the network scale. Average peak and cost reductions of 5.0% and 8.2% translate into lower demand charges, fewer feeder excursions, and more predictable operation for operators and utilities. The fairness envelope limits the concentration of deferrals and helps keep user experience stable without per-session micromanagement. Because decisions flow through OCPP, the same backend can coordinate mixed vendors and models, which fits how cities actually procure and expand charging infrastructure.
The measured latency confirms that control cycles can run on commodity hardware. The scheduling step adds less than 0.1 s per day per site, which leaves ample headroom for metering, forecasting, and message round-trip. The anomaly module adds a safeguard that can reduce time to detection for failures or irregular behavior.
Another important consideration is the choice between centralized scheduling and distributed, market-based control. The proposed framework adopts a centralized approach in which a control agent computes charging schedules and enforces them through OCPP messaging. This design enables explicit enforcement of grid constraints, such as peak caps and fairness limits, and provides deterministic behavior under fixed tariffs. Such properties are particularly valuable in urban networks where feeder limits and service guarantees must be respected.
In contrast, distributed control mechanisms rely on price signals or local decision-making by individual agents, allowing charging demand to respond organically to market conditions. These approaches offer scalability and flexibility under uncertainty but may provide weaker guarantees on peak demand or fairness without additional coordination mechanisms.
The proposed architecture can support a hybrid model by incorporating dynamic pricing signals into the scheduling objective, allowing partial decentralization while retaining centralized safeguards. This suggests that centralized and distributed paradigms are not mutually exclusive, and that OCPP-based coordination can serve as a bridge between operator-driven control and market-based flexibility in future charging networks.
Three limitations are worth noting. First, forecast quality depends on data coverage. Cold-start deployments may require transfer learning or hierarchy-based pooling until sufficient local data becomes available. Second, while the current policy scales well in the studied setting, very large metropolitan networks may benefit from feeder-aware decomposition and distributed rollout with explicit feeder constraints. Third, the study focuses on unidirectional charging. Extending to vehicle-to-grid scenarios and co-optimizing with local solar or storage would broaden impact and align with net-zero goals.
Beyond these limitations, several extensions can strengthen real-world deployment. These include incorporating feeder ratings directly into the optimization, evaluating sensitivity under finer-grained tariff structures, and conducting field trials that log OCPP transactions and operational outcomes. Expanding anomaly labels and adopting budget-based thresholding would further align detection performance with operator capacity, while public release of scripts and notebooks would support reproducibility.
A further consideration is the ongoing transition toward power systems with high renewable penetration, where generation becomes variable and uncertain. The current framework assumes posted time-of-use tariffs and fixed daily peak caps, which reflect relatively stable supply conditions. Under renewable-dominated scenarios, charging control must increasingly align demand with variable generation rather than focusing only on peak reduction.
The proposed framework can be extended in this direction by incorporating renewable generation forecasts and dynamic pricing signals into the scheduling objective. This would allow the GA + Q policy to jointly optimize cost, peak demand, and renewable utilization, while maintaining fairness constraints. The rolling-horizon and OCPP-based control structure remains compatible with real-time grid signals, enabling integration with demand response programs and distribution-level flexibility markets. As such, the approach can evolve toward uncertainty-aware and supply-following control in future smart grid environments.
We presented an OCPP integrated AI framework for city scale EV charging. The system links an ensemble forecaster (Prophet, XGBoost, GRU) with a tariff and fairness aware scheduler (GA + Q) and a runtime anomaly module, and it encodes decisions as OCPP 1.6 and 2.0.1 operations so the same logic runs on heterogeneous stations.
On a two year multi station dataset, the scheduler delivers deployment realistic average reductions of 5.0% with GA and 8.2% with GA + Q in both feeder peak and charging cost on the 455 priced days, while conserving daily energy. Under fixed caps and control windows, the policy is deterministic, which yields point valued day level confidence intervals. A latency budget confirms near real time operation with optimization overhead below 0.1 s. The anomaly module reaches ROC AUC 0.914 with a CNN and provides an operating point using Youden’s \(\:J\).
The main value of this work is the combination of accuracy, fairness aware control, and standards based deployment. By embedding AI decisions in OCPP messages, the framework supports growth across vendors and sites and aligns with how cities procure and operate charging networks.
Future work will extend the scheduler with feeder thermal limits and vehicle to grid interaction, integrate renewable forecasts, and run field trials that log OCPP traffic and operational outcomes. These steps will further strengthen the link between research and practice.
In summary, the Hybrid AI and OCPP framework provides a practical path to lower peaks and costs while maintaining service equity and interoperability in smart city charging.
The datasets used and analyzed during the current study originate from the ChargeSini EV charging facilities. These data are not publicly available due to licensing restrictions and confidentiality obligations imposed by the charging station owner, who did not grant permission for public dissemination of the raw operational records. De-identified aggregated data and the reproducibility package (forecasting, scheduling, and anomaly-detection scripts) are available from the corresponding author upon reasonable request.
Creutzburg, C., Doerr, L. M. & Maennig, W. Exponential effects of public purchasing subsidies: a full-sample analysis of electric vehicle adoption in Germany. Transp. Res. Part. A: Policy Pract. 201, 104668 (2025).
Arooj, A. et al. Unraveling the smart charging technologies, energy sources, and regulatory standards for EVs. IEEE Access. 13, 108148–108167 (2025).
Mokhtari, R., Montazeri, M., Cai, H., Heer, P. & Li, R. Price-responsive control using deep reinforcement learning for heating systems: Simulation and living lab experiment. Energy 337, 138517 (2025).
Hossen, M. S., Ramasamy, G., Sarker, M. T. & Eng, N. E. Real-world tariff-aware safe reinforcement learning for grid-stable OCPP EV charging networks. IEEE Access. 14, 18530–18545. https://doi.org/10.1109/ACCESS.2026.3657040 (2026).
Jørgensen, B. N. & Ma, Z. G. Regulating AI in the energy sector: A scoping review of EU laws, challenges, and global perspectives. Energies 18, 2359 (2025).
Martins, J. A. & Rodrigues, J. M. F. Intelligent monitoring systems for electric vehicle charging. Appl. Sci. 15, 2741 (2025).
Hossen, M. S., Ramasamy, G. & Eng, N. E. AI-OCPP Framework for smart and safe EV charging: real-world performance evaluation. IEEE Access. 14, 34755–34768. https://doi.org/10.1109/ACCESS.2026.3666978 (2026).
Wang, Y., Mao, M. & Chang, L. Multi-time scales prediction of aggregated schedulable capacity of electric vehicle fleets based on enhanced Prophet-LGBM algorithm. Appl. Energy. 374, 124018 (2024).
Bebuchi, C. C. Day-ahead energy price forecasting with machine learning: Role of endogenous predictors. Forecasting 7, 18 (2025).
Singh, V., Sahana, S. K. & Bhattacharjee, V. A novel CNN-GRU-LSTM based deep learning model for accurate traffic prediction. Discover Comput. 28, 38 (2025).
Cavus, M., Ayan, H., Bell, M., Oyebamiji, O. K. & Dissanayake, D. Deep charge-fusion model: Advanced hybrid modelling for predicting electric vehicle charging patterns with socio-demographic considerations. Int. J. Transp. Sci. Technol. (2025).
Dey, B. et al. Cost-effective optimal scheduling of PHEV integrated microgrid with load curve restructuring strategies. Discover Comput. 28, 26 (2025).
Christensen, K., Jørgensen, B. N., Ma, Z. G., Multi-Agent, A. & Laxity-based aggregation strategy for cost-effective electric vehicle charging and local transformer overload prevention. Sustainability 17, 3847 (2025).
Mustaffa, Z. & Sulaiman, M. H. Advanced forecasting of building energy loads with XGBoost and metaheuristic algorithms integration. Energy Storage Saving (2025).
Abdellahi, L. S. A., Zoubeir, Z., Mohamed, Y., Haouba, A. & Hmetty, S. Deep reinforcement learning for optimal replenishment in stochastic assembly systems. Mathematics 13, 2229 (2025).
Wang, Y., Li, J., Yang, X. & Peng, Q. UAV–ground vehicle collaborative delivery in emergency rresponse: A review of key technologies and future trends. Appl. Sci. 15, 9 (2025).
Garcia-Torres, F. et al. Model predictive control for microgrid functionalities: Review and future challenges. Energies 14, 1296 (2021).
Said, D. A Survey on information communication technologies in modern demand-side management for smart grids: Challenges, solutions, and opportunities. IEEE Eng. Manage. Rev. 51 (1), 76–107. https://doi.org/10.1109/EMR.2022.3186154 (2023).
Said, D., Rehmani, M. H., Mellal, I., Oukaira, A. & Lakhssass, A. Cybersecurity based on converged form of blockchain, internet-of-things and machine learning in smart micro-grid. In International Conference on Computing, Internet of Things and Microwave Systems (ICCIMS), Gatineau, QC, Canada. pp. 1–6, https://doi.org/10.1109/ICCIMS61672.2024.10690628 (2024).
Zideh, M. J., Khalghani, M. R. & Solanki, S. K. An unsupervised adversarial autoencoder for cyber attack detection in power distribution grids. Electr. Power Syst. Res. 232, 110407 (2024).
Reis, M. J. C. S. & Reis, A. J. D. Edge-based real-time fault detection in UAV systems via B-spline telemetry reconstruction and lightweight hybrid AI. Sensors 25, 4944 (2025).
Article ADS PubMed PubMed Central Google Scholar
Sun, Y., Mallick, T., Balaprakash, P. & Macfarlane, J. A data-centric weak supervised learning for highway traffic incident detection. Accid. Anal. Prev. 176, 106779 (2022).
Soundararajan, J., Kalukin, A., Malof, J. & Xu, D. Deep learning-driven multi-temporal detection: Leveraging DeeplabV3+/efficientnet-B08 semantic segmentation for deforestation and forest fire detection. Remote Sens. 17, 2333 (2025).
Kirchner, S. R. & Interoperability, O. C. P. P. A unified future of charging. World Electr. Veh. J. 15, 191 (2024).
Aloqaily, O. I., Al-Anbagi, I., Said, D. & Mouftah, H. T. Flexible charging and discharging algorithm for electric vehicles in smart grid environment. In IEEE Wireless Communications and Networking Conference, Doha, Qatar. pp. 1–6, https://doi.org/10.1109/WCNC.2016.7565123 (2016).
Mohsen, O., Mohamed, Y. & Al-Hussein, M. A machine learning approach to predict production time using real-time RFID data in industrialized building construction. Adv. Eng. Inform. 52, 101631 (2022).
Hossen, M. S., Sarker, M. T., Al Qwaid, M., Ramasamy, G. & Eng, N. E. AI-driven framework for secure and efficient load management in multi-station EV charging networks. World Electr. Veh. J. 16, 370 (2025).
Bawa, S., Rana, P. S. & Tekchandani, R. Multivariate time series ensemble model for load prediction on hosts using anomaly detection techniques. Cluster Comput. 27, 10993–11016 (2024).
Tan, M., Ren, Y., Pan, R., Wang, L. & Chen, J. Fair and efficient electric vehicle charging scheduling optimization considering the maximum individual waiting time and operating cost. IEEE Trans. Veh. Technol. 72 (8), 9808–9820 (2023).
Maazalahi, M. & Hosseini, S. A novel hybrid method using grey wolf algorithm and genetic algorithm for IoT Botnet DDoS attacks detection. Int. J. Comput. Intell. Syst. 18, 61 (2025).
Yazdinejad, A., Wang, H. & Kong, J. Advanced AI-driven methane emission detection, quantification, and localization in Canada: A hybrid multi-source fusion framework. Sci. Total Environ. 998, 180142 (2025).
Article CAS PubMed Google Scholar
Hossen, M. S. et al. Federated AI-OCPP framework for secure and scalable EV charging in smart cities. Urban Sci. 9, 363 (2025).
Dong, H. et al. Multiple time scale deep expert system for load forecasting of electric vehicle charging stations. IEEE Trans. Smart Grid. 16 (5), 4015–4031 (2025).
Yang, D., Li, W., Yagli, G. M. & Srinivasan, D. Operational solar forecasting for grid integration: Standards, challenges, and outlook. Sol. Energy. 224, 930–937 (2021).
Singh, U. et al. GA-LSTM: Performance optimization of LSTM driven time series forecasting, Computat. Econ. (2024).
Zulfiqar, M., Alshammari, N. F. & Rasheed, M. B. Reinforcement learning-enabled electric vehicle load forecasting for grid energy management. Mathematics 11, 1680 (2023).
Zafar, M. H. et al. Hybrid deep learning model for efficient state of charge estimation of Li-ion batteries in electric vehicles. Energy 282, 128317 (2023).
Hossen, M. S., Ramasamy, G., Eng, N. E., Sarker, M. T. & Nabi, M. S. Artificial intelligence for sustainable EV charging: Integrated forecasting, anomaly detection, and scheduling in smart grids. SSRN Electron. J. (2025).
The author(s) would like to express sincere gratitude to the academic mentors, colleagues, and peers whose constructive feedback and encouragement significantly contributed to the development of this research. Appreciation is also extended to the institutions and communities that provided valuable resources and support throughout the study. The authors declare that this research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.
Faculty of AI and Engineering, Multimedia University, Cyberjaya, 63100, Malaysia
Md Sabbir Hossen, Gobbi Ramasamy, Ngu Eng Eng, Siow Jat Shern & Md Tanjil Sarker
Search author on:PubMed Google Scholar
Conceptualization, M.S.H. and G.R.; methodology, M.S.H. and G.R.; software, M.S.H. and M.T.S.; validation, M.S.H., S.J.S. and G.R.; formal analysis, M.S.H., G.R.; investigation, G.R. and N.E.E.; resources, M.S.H., G.R. and N.E.E.; data curation, S.J.S. and M.S.H.; writing original draft preparation, M.S.H.; writing review and editing, M.S.H., S.J.S. , G.R., and M.T.S.; visualization, M.S.H.; supervision, G.R. and N.E.E.; project administration, G.R.; funding acquisition, G.R. All authors have read and agreed to the published version of the manuscript.
Correspondence to Md Sabbir Hossen or Gobbi Ramasamy.
The authors declare no competing interests.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
Hossen, M.S., Ramasamy, G., Eng, N.E. et al. OCPP integrated artificial intelligence for forecasting scheduling and anomaly detection in city scale electric vehicle charging under urban tariffs. Sci Rep 16, 19725 (2026). https://doi.org/10.1038/s41598-026-49535-7
Version of record: 29 June 2026
DOI: https://doi.org/10.1038/s41598-026-49535-7
Related Stories
 AI News
AI News
A strong aftershock rattles Venezuela as rescue workers race to find survivors
10 minutes ago
 AI News
AI News
One person killed and one injured in shooting at California World Cup ‘fan zone’
10 minutes ago
 AI News
AI News
Weather tracker: North
10 minutes ago
 AI News
AI News
Brazil Dealt Unfortunate News Amid Japan World Cup Game
10 minutes ago
 AI News
AI News
Rescue teams race against clock to find Venezuela earthquake survivors
10 minutes ago
 AI News
AI News
Alberta separatists rally in Taber
11 minutes ago
 AI News
AI News
Gilgeous
11 minutes ago
 AI News
AI News
Heavy rainfall across Saskatchewan leaves some streets of Regina underwater
12 minutes ago